 |
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

|

Bezpieczeństwo i niezawodność urządzeń srkSpis treści:1. Informacje ogólne 2. Bezpieczeństwo urządzeń srk 3. Niezawodność urządzeń srk 1. Informacje ogólnePodstawową funkcją urządzeń srk jest zapewnienie bezpieczeństwa ruchu kolejowego. Pojęcie bezpieczeństwa w odniesieniu do urządzeń srk definiowane jest jako wykluczenie z odpowiednio wysokim prawdopodobieństwem stanów niebezpiecznych dla ruchu kolejowego[6]. System srk musi charakteryzować się bezpiecznością (fail-safe), co oznacza że uszkodzenie systemu nie może powodować zagrożenia i powinno być wykrywane natychmiast, w cyklu samokontroli lub najpóźniej w następnym cyklu pracy (np. nastawienia przebiegu). Uszkodzenie mające wpływ na bezpieczeństwo ruchu powinno spowodować przejście systemu do stanu bezpiecznego (np. wyświetlenie sygnału "Stój", uniemożliwienie wykonania polecenia). Wraz z ewolucją techniki srk powstawały kolejne rodzaje urządzeń, które w coraz większym zakresie kontrolowały stan urządzeń zewnętrznych i jazdę pociągu, zapewniając różny poziom bezpieczeństwa. Biorąc pod uwagę zakres funkcji realizowanych przez urządzenia srk wyróżnić można cztery stopnie bezpieczeństwa ruchu, opisane w tabl. 1.[1]
Na polskich kolejach szeroko rozpowszechnione są urządzenia mechaniczne i przekaźnikowe, zapewniające II i III stopień bezpieczeństwa ruchu. Wprowadzane urządzenia komputerowe także zapewniają III stopień bezpieczeństwa ruchu. Na niektórych liniach lokalnych spotyka się jeszcze urządzenia zapewniające tylko I stopień bezpieczeństwa ruchu. Urządzenia zapewniające IV stopień bezpieczeństwa ruchu, z samoczynnym hamowaniem pociągu przy braku reakcji maszynisty na sygnał, w Polsce wciąż są rzadkością. Za funkcje, które nie są realizowane przez urządzenia o niższych stopniach bezpieczeństwa, odpowiada personel poprzez wzrokową obserwację ruchu pociągów i sygnałów. 2. Bezpieczeństwo urządzeń srkBezpieczeństwo działania urządzeń realizujących zależności na drodze mechanicznej osiągane jest poprzez odpowiedni kształt i konstrukcję mechanicznych elementów nastawnicy oraz właściwe ich utrzymanie. Przy zastosowaniu przekaźników elektromagnetycznych jako elementów realizujących zależności pojawiło się ryzyko wystąpienia stanów niebezpiecznych przy nieprawidłowej pracy przekaźnika, np. w przypadku braku otwarcia zestyku zwiernego po odwzbudzeniu przekaźnika. Z tego względu przekaźniki stosowane w technice srk, których działanie ma bezpośredni wpływ na bezpieczeństwo ruchu, muszą spełniać określone wymagania. W polskim kolejnictwie wyróżnia się pod tym względem[1]:
Przekaźniki typu N muszą same spełniać warunki bezpieczeństwa bez dodatkowej kontroli. Otwarcie zestyków zwiernych nastąpić musi pod wpływem ciężaru własnego kotwicy, a ich styczki wykonane muszą być z materiałów zapewniających niezgrzewalność. Dla przekaźników typu C stosowana jest dodatkowa kontrola działania ich zestyków przez obwód elektryczny. Ponadto wyróżnia się przekaźniki pomocnicze, najczęściej teletechniczne, które stosowane mogą być poza związanymi z bezpieczeństwem obwodami realizującymi zależności, np. w obwodach sygnalizacji na pulpicie nastawczym. Bardziej złożonym zagadnieniem jest zapewnienie bezpieczeństwa w urządzeniach realizujących zależności elektronicznie. Zawierają one dużą liczbę podatnych na uszkodzenia układów scalonych i elementów półprzewodnikowych, a ponadto błędy powstać mogą w procesie tworzenia oprogramowania. Dlatego w całym cyklu projektowania i budowy systemu spełnione muszą być odpowiednie wymagania dotyczące zarządzania jakością i bezpieczeństwem, które minimalizują ryzyko błędów systematycznych. Schemat projektowania i budowy systemu srk w formie tzw. cyklu V przedstawiono na rys. 1.[3] 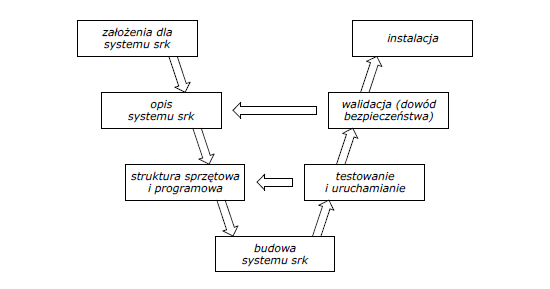 Rys. 1. Uproszczony schemat projektowania i budowy systemu w oparciu o cykl V Wymagania dotyczące projektowania i budowy systemów srk oraz stosowanego w nich oprogramowania określają normy europejskie, m.in. EN 50126, EN 50128, EN 50129. W procesie budowy systemu srk powstaje tzw. dowód bezpieczeństwa, będący zestawem dokumentów potwierdzających spełnienie wymagań oraz wykazujących, że system działa bezpiecznie pod wpływem losowych uszkodzeń i innych czynników[1]. Przy określeniu bezpieczeństwa urządzeń elektronicznych stosowane jest podejście probabilistyczne. Przeprowadzana jest analiza prawdopodobieństwa losowych uszkodzeń poszczególnych elementów i określane jest prawdopodobieństwo wystąpienia uszkodzenia, który może doprowadzić do stanu niebezpiecznego. Dla zminimalizowania tego prawdopodobieństwa na ogół stosowane jest przetwarzanie danych przez dwa niezależne kanały sprzętowe oraz zróżnicowane oprogramowanie, ze sprawdzaniem zgodności wyników (struktura 2 z 2). W celu podwyższenia dyspozycyjności stosowany może być trzeci kanał, który pozwala na dalsze działanie systemu w razie usterki w jednym z kanałów (struktura 2 z 3). Prawdopodobieństwo wystąpienia niebezpiecznego uszkodzenia w jednostce czasu nazywane jest dopuszczalną intensywnością zagrożeń THR (Tolerable Hazard Rate). Określa się pięć poziomów nienaruszalności bezpieczeństwa SIL (Safety Integrity Level) wraz z zakresami wymaganej wartości dopuszczalnej intensywności uszkodzeń. Urządzenia srk, zależnie od spełnianych funkcji, zapewniać muszą odpowiedni poziom nienaruszalności bezpieczeństwa (tabl. 2.)[6].
Określone rodzaje urządzeń przeznaczonych do prowadzenia ruchu kolejowego na polskich kolejach uzyskać muszą tzw. świadectwo dopuszczenia do eksploatacji typu. Świadectwo to wydawane jest przez Urząd Transportu Kolejowego na podstawie dokumentacji technicznej, dowodu bezpieczeństwa, wyników badań urządzenia przeprowadzonych przez upoważnioną jednostkę i innych dokumentów[5]. 3. Niezawodność urządzeń srkBezpieczeństwo S, definiowane jako prawdopodobieństwo przebywania urządzenia w stanie bezpiecznym, wraz z niezawodnością, dostępnością i obsługiwalnością wchodzi w skład analizy RAMS (Reliability, Availability, Maintainability, Safety), opisującej zagadnienia niezawodności i bezpieczeństwa wskaźnikami liczbowymi. Określenie tych wskaźników jest wymagane dla projektowanych urządzeń srk[6]. Pozostałe składniki analizy RAMS na ogół definiowane są następująco:
Niezawodność działania urządzeń srk również jest bardzo ważna z punktu widzenia bezpieczeństwa ruchu, niezależnie od zapewnienia bezpiecznej reakcji urządzeń na uszkodzenia. Sytuacje usterek urządzeń srk wymagają często wprowadzenia specjalnych procedur prowadzenia ruchu, np. telefonicznego zapowiadania pociągów czy przekazywania zezwoleń na jazdę w postaci rozkazów pisemnych bądź sygnałów zastępczych, gdzie za bezpieczeństwo bezpośrednio odpowiedzialny jest dyżurny ruchu. Prawdopodobieństwo błędu ludzkiego szacowane jest jako przynajmniej 60 razy większe od prawdopodobieństwa niebezpiecznego uszkodzenia urządzeń[4], co oznacza, że mimo przejścia urządzeń do stanu bezpiecznego w czasie występowania usterek ryzyko wypadków znacznie wzrasta. Bibliografia
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
(c) Paweł Okrzesik 2004-2021. Wykorzystywanie materiałów bez wiedzy i zgody autora niedozwolone. |
